
一体化关节模组
什么是机器人一体化关节模组
一体化关节模组是一种高度集成的机器人运动控制单元,将伺服电机、减速器、编码器、驱动器、制动器等核心部件整合于一个紧凑的模块之中,融合了动力输出、精准传动与智能控制三大核心功能-13。它被形象地称为机器人运动的“心脏”或“动力核心”,直接决定机器人的运动精度、负载能力与整机可靠性.
与传统分体式关节方案不同,一体化关节模组采用模块化设计,具备统一的机械接口与电气通信协议,用户可以像“搭积木”一样快速拼接和更换关节,极大简化了机器人的设计、装配与维护流程。
核心组成
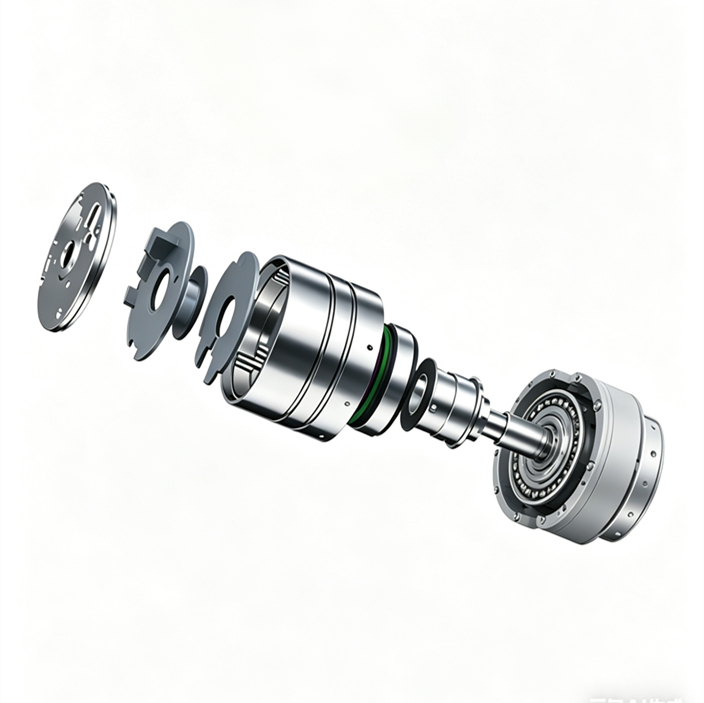
一体化关节模组在物理结构上通常由以下核心部件高度集成于一个壳体内:
驱动单元:采用高性能无框力矩电机,具备高扭矩密度和低转子惯量,为关节提供动力输出。
传动单元:通常采用谐波减速器或行星减速器。谐波减速器具有无背隙、传动比大、体积小等优势,适用于手臂、手腕等需要高运动精度的部位-;行星减速器则以抗冲击能力强、过载性能好为特点,适用于腿部等需要承受较大冲击的关节。
感知单元:包括位置传感器(常采用双编码器冗余设计,集成电机端增量编码器和输出端绝对编码器)、力矩/力传感器(用于实时感知外部负载)以及温度传感器(用于过热保护)。
控制单元:集成的伺服驱动器与控制板,内置智能控制算法,通过CAN、EtherCAT等总线通信方式接收上位指令并实时反馈运行数据。
制动与安全单元:失电制动器,用于在断电时保持关节位置,防止机器人意外跌落。
结构单元:采用高强度轻量化材料(如铝合金压铸外壳),内部采用中空走线设计,既保证了结构紧凑,也优化了线缆布局。
